


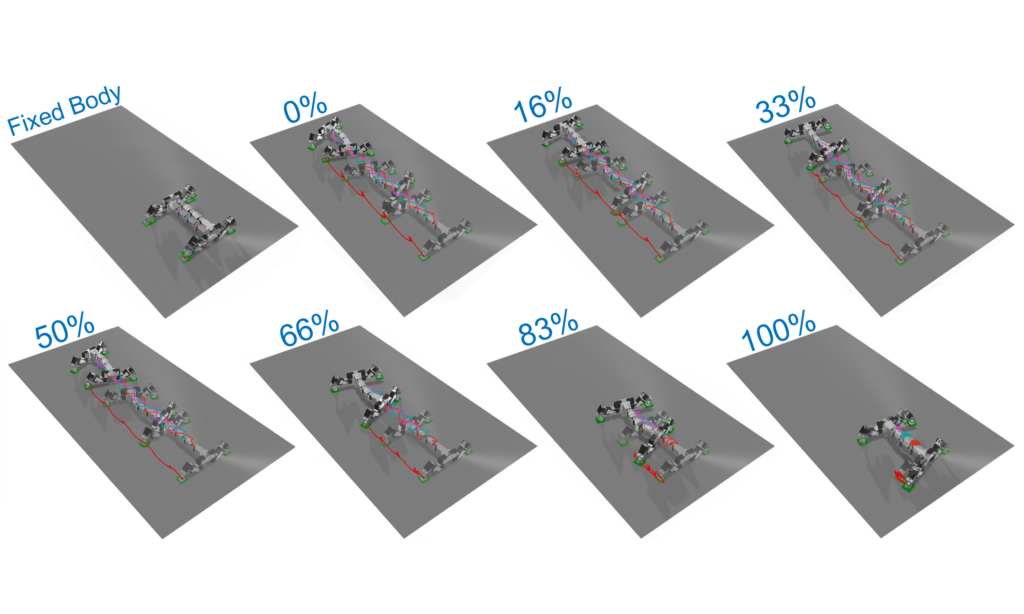
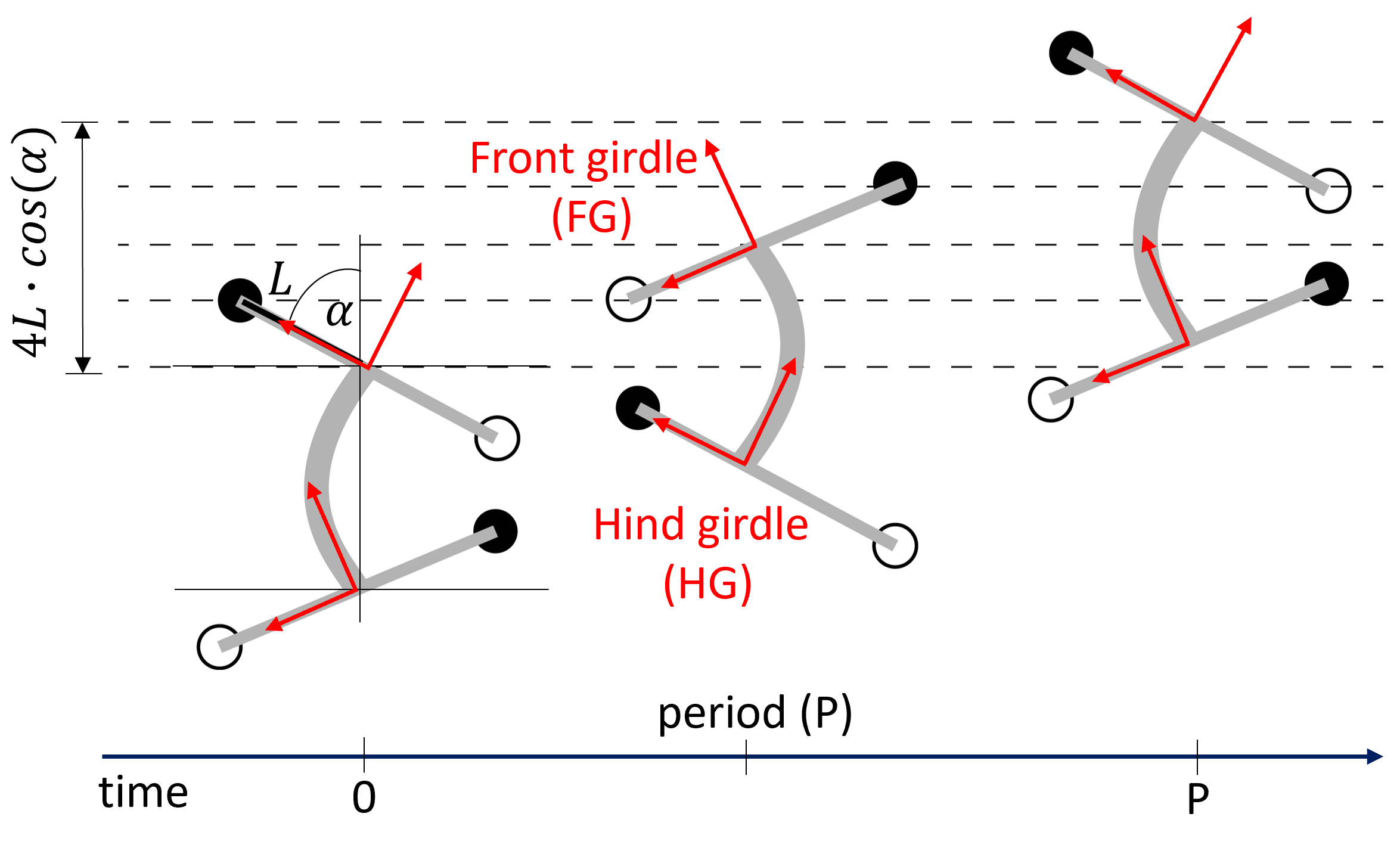
CoT is influenced by two factors for this study, which consist of energy consumption and the traveled distance. For traveled distance, we use a simple geometrical model to estimate the stride length of the robot (FIG_WEB1). In this model, we assume that stride lengths are constant without any slippage during locomotion, and the movements of the left and right legs are symmetrical. Therefore, we can calculate the stride length (![]()




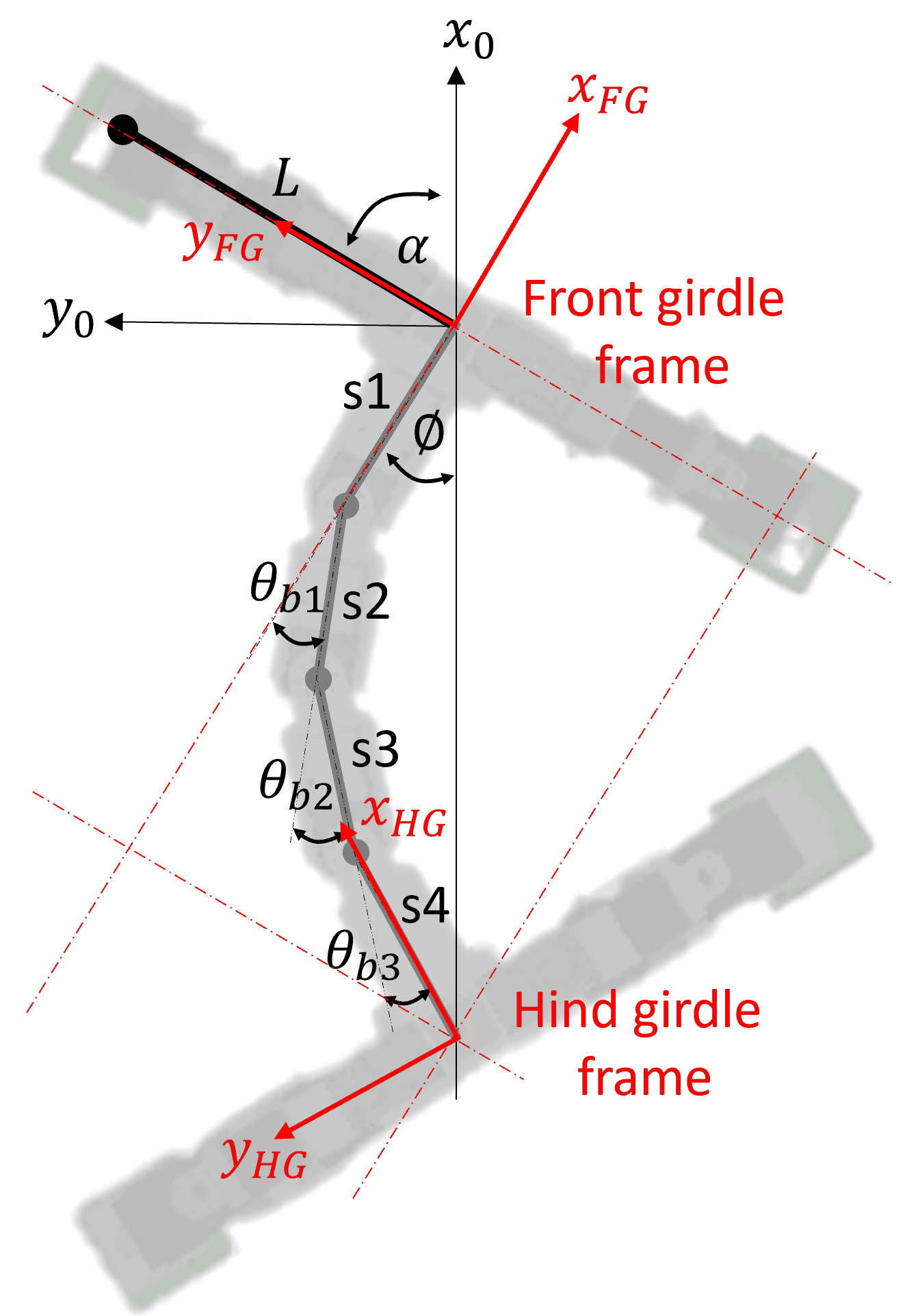
Setting the front girdle frame as the body’s base (![]()
![]()
![]()
![]()






where each segment length of our robot body is ![]()
![]()
![]()
![]()
![]()
![]()
![]()





At the beginning of the stance phase, we assume that the forward direction of locomotion (i.e., x-axis of the world frame (![]()
![]()
![]()
![]()




Where ![]()
![]()
![]()
![]()
![]()
![]()
![]()
Based on the geometric relationship of the model, we obtain the angle of ![]()
![]()



The body wave pattern is generated by using delay line units to shift the phase of the CPG signal (i.e., the output of CPG neuron 1 (![]()


where ![]()
![]()
![]()
![]()
![]()




For our neural control network (Fig. 2A), there are three delay lines (![]()
![]()
![]()
![]()
![]()
![]()
![]()

For example, 50 %Trav (or 50% traveling wave) means that the phase of the second body joint b2 is shifted from the first body joint b1 by π/3 radians, and the phase of the third body joint b3 is shifted from b2 by π/12 radians or from b1 by π/3 + π/12= 5π/12 radians. To generate this body-wave pattern, we apply different delay factors to the CPG signal (![]()

where ![]()
![]()
![]()
![]()
![]()
![]()
![]()

According to the above mechanism, our control network with delay lines can generate various body wave patterns by setting the delay factors (![]()

The transition gradient of body movement is performed by simultaneously changing body patterns (%Trav) through the delay factors (![]()
![]()
![]()
(i) 1st stride: select a state with a minimum average of CoT.
(ii) 2nd and 3rd strides: change to a neighboring state in the minimum CoT region that exhibits the maximum velocity.
For more understanding, we used a state to represent body movement parameters which consist of percentage of traveling waves (%Trav) and stride frequency when the robot climbs at different slope angles. For example, ![]()
![]()
![]()
![]()

More specifically, we demonstrated a body-wave transition strategy at a 30-degree slope angle from the first to third stride step-by-step (Fig. 3B):
1st stride: the robot begins climbing at 30 degrees with a %Trav of 16% and stride frequency of 0.33Hz. At the moment, the speed of the robot is 0.048 m/s and CoT is lowest value (0.28). The blue circle indicates the selected state ![]()
2nd stride: the robot performs the next state ![]()
3rd stride: the robot proceeds to the steady state ![]()
Therefore, the gradient transition for climbing at 30 degrees can be generated as a series of state: ![]()
![]()
![]()